Operator Methods in Systems and Control: Theory and Applications
Abstract
The classical notion of state is a set of quantities in memory that completely describe the evolution of a system in time. This allows one to work in the so-called state-space, which helped turn much of the control theory into practical algorithms we use for estimation and control. Although the minimal structure of the state is often well known for rigid body dynamics, for example, in terms of position and velocities, there is a plethora of algorithms that lack such clearly defined quantities of interest.
With the increase in complexity of problems we are trying to tackle as a community, be it in unknown systems where only data is available or systems with distributed parameters (modeled by PDEs), such as fluids, properly choosing the state variables or state-space in advance comes with great challenges. On one hand, it may be infeasible and impractical to find a suitable state representation of known and complex high-dimensional nonlinear systems. On the other hand, even with a classical minimal state-space representation available, exploiting data-driven models with highly nonlinear dynamics is nontrivial, as optimization-based control and estimation lead to non-convex optimization problems that admit no generic global solution schemes.
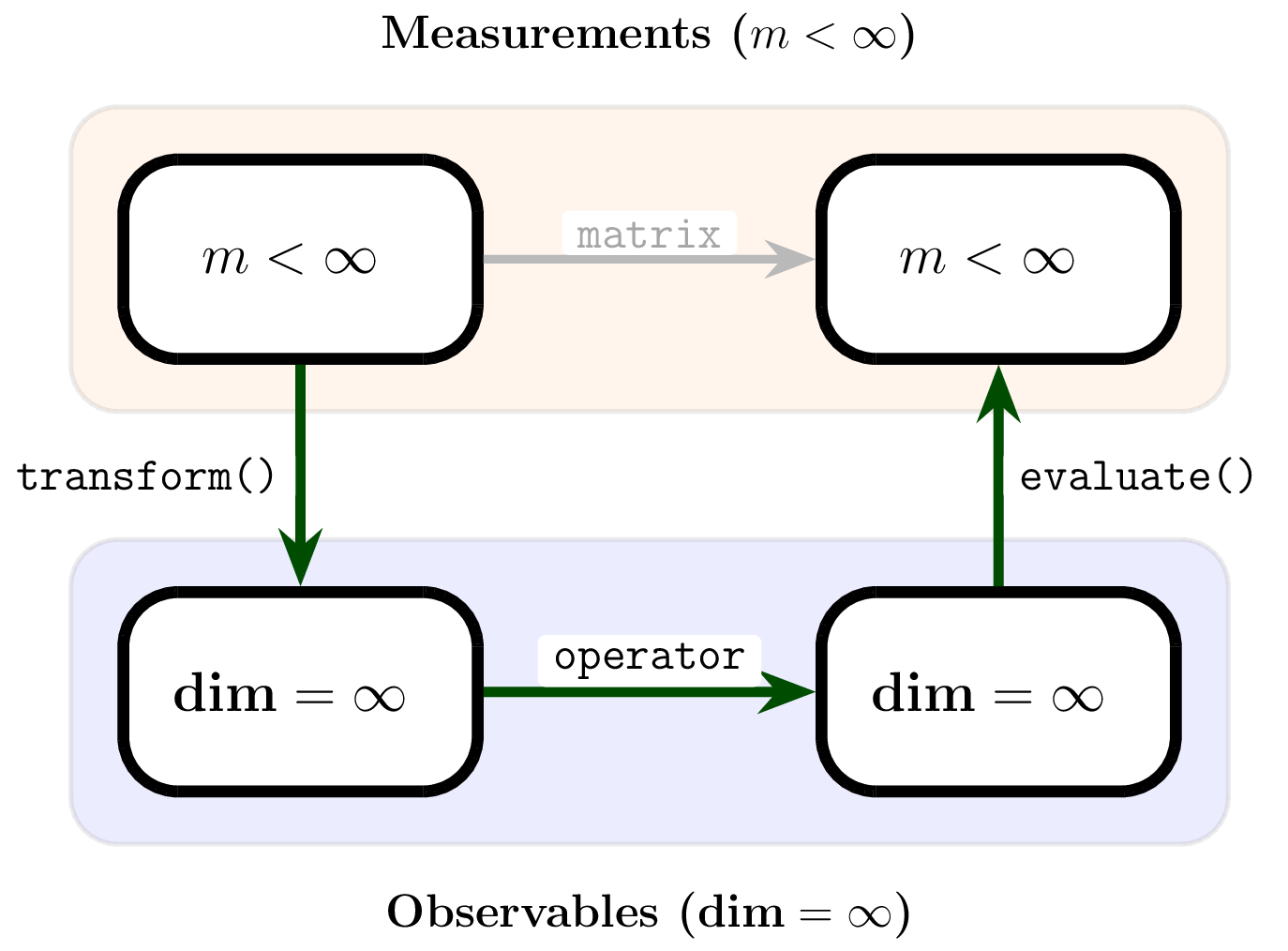
By abstracting the minimal state variables to observable functions of a different set of variables (perhaps not a minimal state in the classical sense), we can model a dynamical system by the operator acting on observables. Remarkably, these operators are linear operators, a property highly desired by control engineers as it allows one to reformulate non-convex into convex optimization problems or even argue about robustness or input-output properties using linear system analysis techniques.
Motivation and Introduction
The landscape of systems and control theory is undergoing a paradigm shift, driven by the increasing complexity of real-world problems—from large-scale networks and distributed parameter systems to data-driven applications in robotics, fluid dynamics, and energy systems. Traditional state-space models, while foundational, face inherent limitations when confronted with high-dimensional, nonlinear, or partially observable dynamics.
There is, however, an alternative description of nonlinear dynamical systems, which contrasts with the classical representation of trajectories in the (immediate) state-space. This description relies on the so-called Koopman (or composition) operator. Even though the dynamical system is nonlinear, its (infinite-dimensional) representation in terms of the Koopman operator is linear. Therefore, this operator-theoretic representation offers a tantalizing possibility to study nonlinear dynamical systems via linear and, in particular, spectral techniques, while being globally valid in the whole state-space.
The approach also lends itself to machine learning, thereby meeting the current trend and need for data-driven methods that are required for analysis of and controller design for complex dynamics emerging in real-world applications. For these reasons, we have witnessed a surge of interest in operator-based approaches, for applications in robotics [Shi et al., 2024] and control [Bevanda et al., 2021], [Brunton et al., 2022], with top-tier conferences holding dedicated workshops [Bevanda et al., 2024], [Bevanda et al., 2025], [Abraham et al., 2024], which the authors of this proposal contributed to. Successful examples of the operator framework include: data-driven system identification [Iacob et al., 2024], analysis [Mezić, 2020], longterm forecasting [Kostić et al., 2024a], classical feedback control [Sträßer et al., 2025], and optimal control [Houska, 2025]. Breakthroughs in machine learning - such as extended dynamic mode decomposition (EDMD) [Williams et al., 2015], kernel-based methods [Kostić et al., 2022], and neural representation learning for linear operators [Ryu et al., 2024], [Kostić et al., 2024b] - have accelerated their adoption, enabling scalable implementations for complex systems modeled by partial differential equations (PDEs) or stochastic processes. Notably, operator methods provide a natural framework for integrating physics-informed learning [Giannakis & Valva, 2025], where domain knowledge is embedded into observable functions, enhancing model interpretability and generalization.
We are hopeful that this invited session may bring together researchers with different perspectives to strengthen joint research efforts at the intersection of classical control theory, machine learning, and operator learning to position systems and control as indispensable also in machine learning-based approaches.
Scope and Directions
This invited track seeks to gather cutting-edge contributions at the intersection of operator theory, machine learning, and control engineering, with a focus on operator-based system representation, data-driven control, theoretical guarantees, and applications. By uniting researchers from dynamical systems, optimization, and machine learning, this track aims to foster cross-disciplinary dialogue and shape the next frontier of scalable, interpretable, and theoretically grounded control solutions.
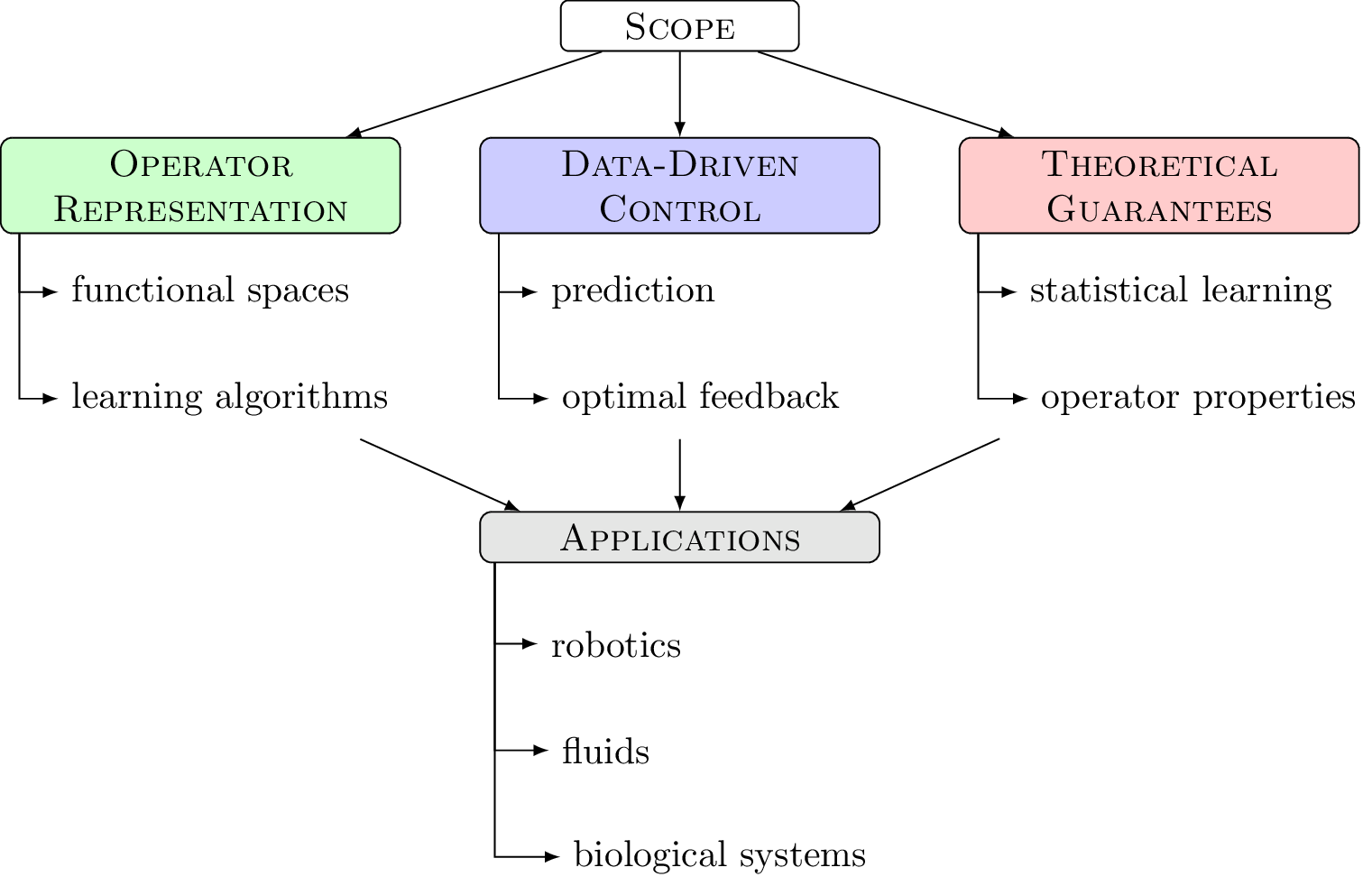
Operator-based system representation
Methods that learn tractable representations of composition (Koopman) and transfer operators, as well as related ones, such as their generators. Possible approaches include physics-informed basis, neural, spectral, or Reproducing Kernel Hilbert Space (RKHS) techniques and algorithms that model or analyze nonlinear dynamics through their operators.
Data-driven control
Automated design of control laws for nonlinear dynamical systems is a notoriously challenging problem. A promising direction is to connect ideas from classical control design with operator representations. This includes risk-aware methods that integrate uncertainty quantification and criteria such as CVaR, operator-theoretic formulations of Bellman's principle of optimality, and evolution operators enabling stochastic control, PDE-constrained optimization, and predictive control.
Theoretical guarantees
Contributions regarding the theoretical properties of the operators of interest in common hypothesis spaces, as well as on algorithms in terms of statistical learning, error bounds, and convergence analysis for operator learning in infinite-dimensional settings.
Applications
We encourage reproducible case studies including strong baselines demonstrating advantages or failure modes of state-of-the-art operator models for prediction, estimation, or control. Another possible application is the analysis of nonlinear systems through spectral techniques to obtain dominant timescales, frequencies, and modes. Possible applications include but are not limited to fluid dynamics, robotics, power grids, and biomedical and biological systems.
References
- Shi, L., Haseli, M., Mamakoukas, G., Bruder, D., Abraham, I., Murphey, T., Cortés, J., & Karydis, K. (2024). Koopman operators in robot learning. arXiv preprint arXiv:2408.04200.
- Bevanda, P., Sosnowski, S., & Hirche, S. (2021). Koopman operator dynamical models: Learning, analysis and control. Annual Reviews in Control, 52, 197-212.
- Brunton, S. L., Budišić, M., Kaiser, E., & Kutz, J. N. (2022). Modern Koopman Theory for Dynamical Systems. SIAM Review, 64(2), 229-340.
- Abraham, I., Shi, L., Asada, H. H., & Karydis, K. (2024). Koopman Operators in Robotics (RSS 2024).
- Bevanda, P., Hirche, S., Lederer, A., Mezić, I., & Worthmann, K. (2024). Data-driven modelling, analysis, and control using the Koopman operator (CDC 2024).
- Bevanda, P., Hirche, S., Lederer, A., Mauroy, A., & Worthmann, K. (2025). Operator learning in systems and control: from Koopman operators to kernel-based learning (CDC 2025).
- Iacob, et al. (2024). Koopman form of nonlinear systems with inputs.
- Mezić, I. (2021). Koopman Operator, Geometry, and Learning (AMS Notices 68)
- Kostić, V., Inzerili, P., Lounici, K., Novelli, P., & Pontil, M. (2024). Consistent long-term forecasting of ergodic dynamical systems. International Conference on Machine Learning.
- Sträßer, R., Worthmann, K., Mezić, I., Berberich, J., Schaller, M., & Allgöwer, F. (2025). An overview of Koopman-based control: From error bounds to closed-loop guarantees. arXiv:2509.02839.
- Houska, B. (2025). Convex operator-theoretic methods in stochastic control. Automatica, 177, 112274.
- Williams, M. O., Kevrekidis, I. G., & Rowley, C. W. (2015). A Data-Driven Approximation of the Koopman Operator: Extending Dynamic Mode Decomposition. Journal of Nonlinear Science, 25(6), 1307-1346.
- Kostić, et al. (2022). Learning Dynamical Systems via Koopman Operator Regression in Reproducing Kernel Hilbert Spaces.
- Ryu, et al. (2024). Operator SVD with Neural Networks via Nested Low-Rank Approximation.
- Kostić, et al. (2024). Neural Conditional Probability for Uncertainty Quantification.
- Giannakis, D., & Valva, C. (2025). Physics-informed spectral approximation of Koopman operators. Physica D: Nonlinear Phenomena, 134835.
BibTeX
@article{houska2026operator,
title={Operator Methods in Systems and Control: Theory and Applications},
author={Hoischen, Nicolas, Max, Beier, Bevanda, Petar, Hirche, Sandra and Houska, Boris},
booktitle={Open invited track @ IFAC World Congress},
year={2026},
url={https://tum.itr.github.io/IFAC-2026-Operator-Methods-in-Systems-and-Control-Theory-and-Applications}
}